CAN-Coder is an additional option for CAN-Hacker interface.
Recommended OS: Windows 10
For using this software make sure:
- Your CAN-Hacker interface has the activated CAN-Coder option (Use the UBT utility for it)
- Your CAN-Hacker interface has the current CAN-Coder firmare (Use the UBT utility for it)
Main functions:
- CLU (Instrument cluster) EOL variant coding, activate\deactivate: TPMS, AFLS, SCC, AEB, etc. Your car should support this function.
- Reading\Writing CLU EEPROM for VDO\Continental clusters
- Odometer calibration for VDO\Continental clusters
- Service interaval and Service type programming
- BCM functions programming (cars since 2018, for cars without ICU )
Additional functions:
- KIA Soul EV1, KIA Optima JF, Sportage 4 Monochrome, HYUNDAI Sonata DN8 (Small display) – Regional settings programming
- Hyundai Tucson-3 2016…2017 Extended variant coding (Active Hood, AEB, etc), Regional settings.
WARNING! Regional settings and additional functions depend on: instrument cluster manufacturer, serial number, firmware version. 100% compatibility is not guaranteed. Check the cluster serial number in AddOn utilites.
See AddOn folder:
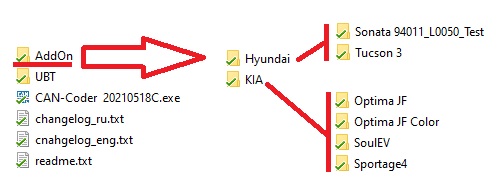
Tested cars list
Abbreviations:
- EOL – Instrument cluster 16\32 bit EOL variant coding.
- EEPROM – Instrument cluster EEPROM Reading\Writing.
- ~EEPROM – Not all EEPROM areas are writable.
- ODO – Odometer calibration. Depends on: cluster model, cluster firmware version, car production date.
- OBD2 – OBD2 Connection for cluster programming.
- C-CAN – C-CAN Connection for cluster programming.
- E-CAN – E-CAN Connection for cluster programmong (For CAN-Hacker CH-P FDL2 only).
- GENESIS G70 IK 2018…2019(16-bit EOL, EEPROM, ODO)
- HYUNDAI Accent 2018…2021 (16-bit EOL, EEPROM, ODO)
- HYUNDAI i20 BC3 2021,E-CAN, (32-bit EOL)
- HYUNDAI Сreta GS 2016…2020 ,OBD2, (16-bit EOL, EEPROM, ODO)
- HYUNDAI Palisade LX2 2021, OBD2, (16-bit EOL)
- HYUNDAI SantaFe TM 2018 , C-CAN, (16-bit EOL)
- HYUNDAI Solaris >2018, OBD2, (EEPROM, ODO)
- HYUNDAI Solaris 2018…2021, OBD2, (16-bit EOL, EEPROM, ODO)
- HYUNDAI Solaris 2021…2022, OBD2, (16-bit EOL, ~EEPROM)
- HYUNDAI Sonata LF только 94001C2000, OBD2, (EOL, EEPROM, ODO)
- HYUNDAI Sonata DN8 2021, C-CAN, (16-bit EOL, EEPROM, ODO)
- HYUNDAI Staria US4 2021 ,E-CAN, (32-bit EOL)
- HYUNDAI Tucson TL 2015…2020, OBD2, (16-bit EOL, EEPROM, ODO)
- HYUNDAI Tucson NX4 2020…2021, E-CAN, (32-bit EOL)
- KIA Carnival KA4 2021, E-CAN, (16-bit\32-bit EOL)
- KIA Ceed CD 2018, C-CAN, (16-bit EOL)
- KIA Ceed JD 2012…2018, OBD2, (16-bit EOL, EEPROM, ODO)
- KIA Optima\K5 2012, OBD2, (EEPROM, ODO)
- KIA Optima\K5 JF4 2016…2020, OBD2, (16-bit EOL, EEPROM, ODO)
- KIA Optima\K5 DL3 2020…2021, C-CAN, (16-bit EOL, EEPROM, ODO)
- KIA Optima\K5 DL3 06.2021…2022, C-CAN, (16-bit EOL, ~EEPROM)
- KIA Rio FB 2018…2021, OBD2, (16-bit EOL, EEPROM, ODO)
- KIA Rio FB 2021…2022, OBD2, (16-bit EOL, ~EEPROM)
- KIA Seltos SP2 2019…2021, C-CAN, (16-bit EOL)
- KIA Sportage QL 2016…2020, OBD2, (Convenience: 16-bit EOL, EEPROM, ODO)
- KIA Sportage QL 2016…2020, OBD2, (Supervision: 16-bit EOL)
- KIA Sorento UM Prime VDO\Continental, OBD2, (16-bit EOL, EEPROM, ODO)
- KIA Sorento UM USA DENSO, OBD2, (16-bit EOL)
- KIA Sorento MQ4 2020, E-CAN, (16-bit EOL, EEPROM, ODO)
- KIA Sorento MQ4 2021…2022, E-CAN, (16-bit EOL, ~EEPROM)
- KIA Stinger CK 2018…2020, C-CAN, (16-bit EOL, EEPROM, ODO)
- KIA Soul SK3 2018…2020, C-CAN, (16-bit EOL)
- KIA Soul 2, 3 OBD2, (VDO\Continental: 16-bit EOL, EEPROM, ODO)
- KIA Soul EV1 OBD2, (EEPROM, ODO, Regional Settings)
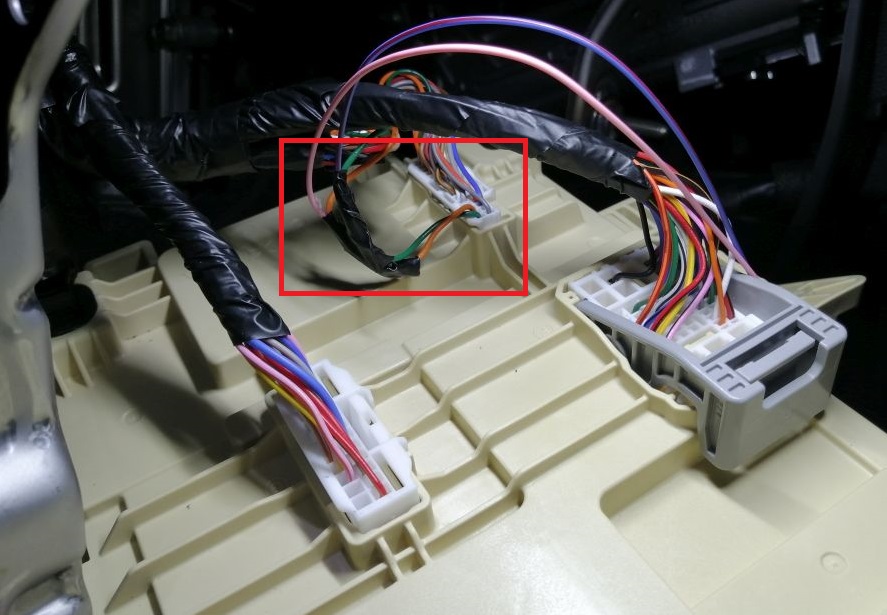
- Since 2018 year KIA\HYUNDAI cars (Ceed CD, Stinger, Optima\K5>2020 and others) can have an ICU control unit – CAN bus gateway. This unit blocks all operations via the OBD connector.
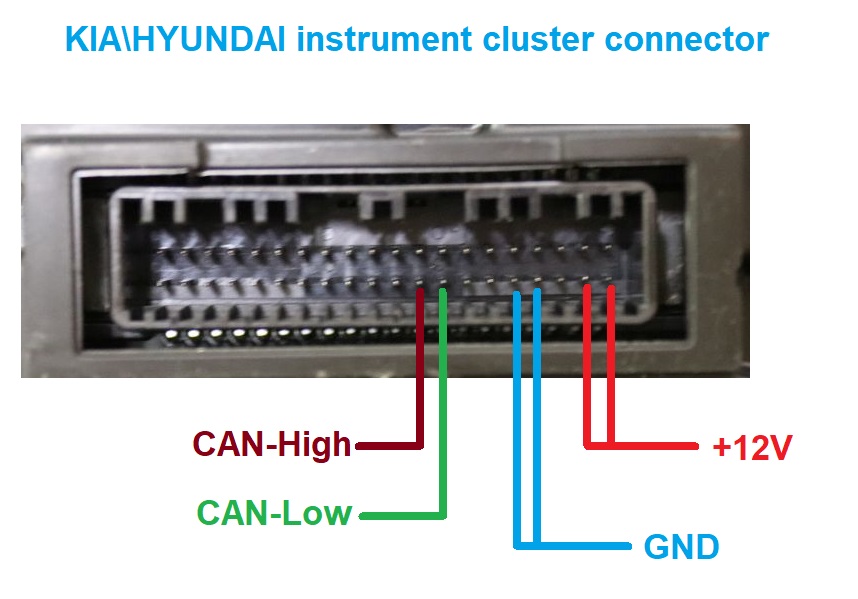
In this case you have to connect to the C-CAN bus directly. You can find the C-CAN on the ICU connector or Instrument cluster. Green and Orange twisted pair.
See car wiring diagramms!
- CAN-Coder is developed for experienced users and owners of KIA \ Hyundai cars.
- CAN-Coder is delivered “as is”. The user is solely responsible for the results of using CAN-Coder.
Interface description
Interface page
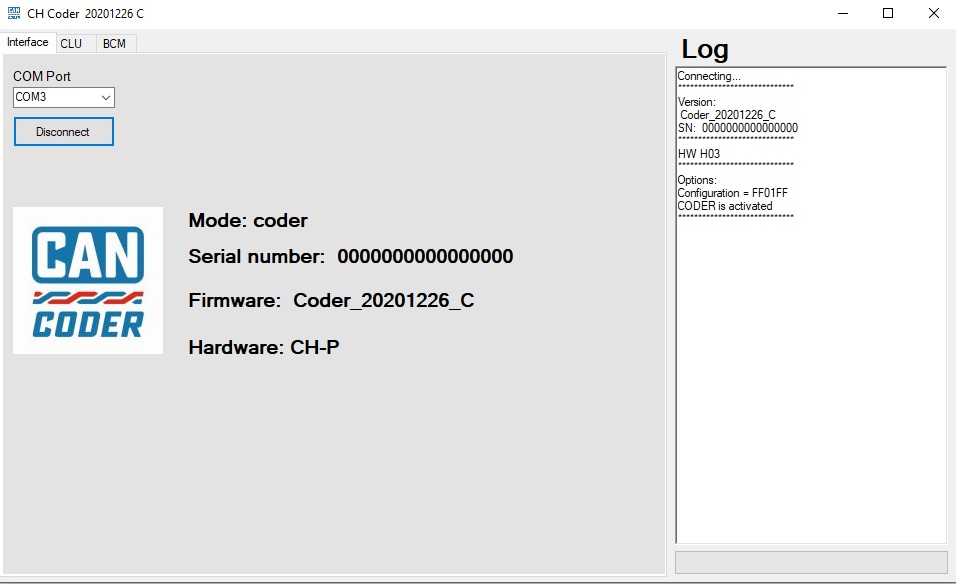
- COM Port – USB Virtual COM port with your CAN-Hacker interface
- Connect\Disconnect button – Connect with your CAN-Hacker interface
CLU Page
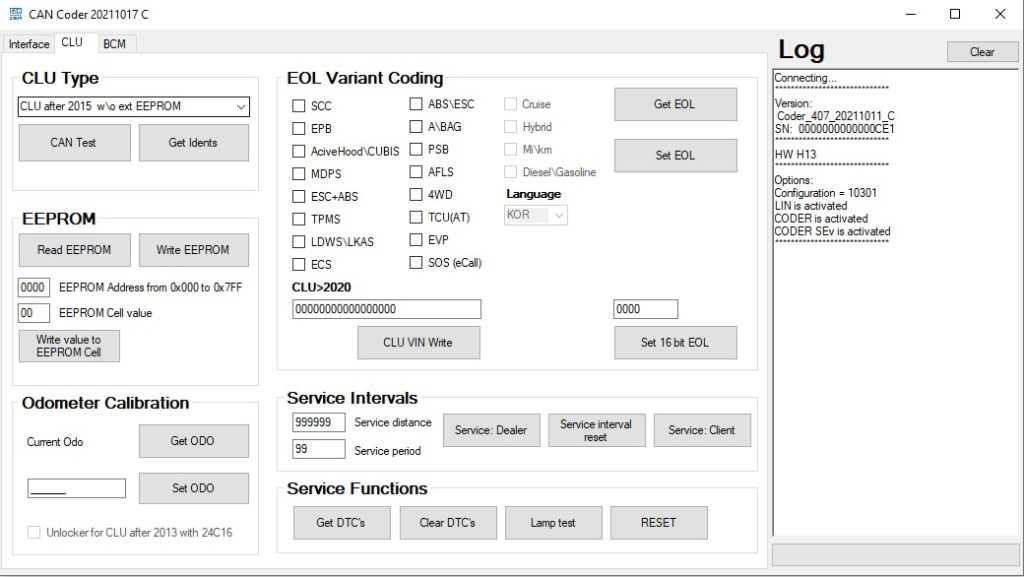
- CLU Type – type of instrument clusters.
- CAN Test – CAN bus connection test.
- Get Idents – Read a CLU Serial Number. Use this number when you svae EEPROM dump.
- Read EEPROM – Read the EEPROM dump (Only for VDO CLUs). Do it before any operations with CLU !
- Write EEPROM – Write the EEPROM dump (Only for VDO CLUs)
- Get ODO – read current odometer data. Correct vakue depends on CLU Type !
- Write ODO – write coreected odometer data. Be very careful ! Check CLU Type !
- Get EOL – Read a current EOL varian code. Save it before correction !
- Set EOL – Programm an EOL varian code by checked flags.
- Set 16 bit EOL value – Programm an EOL variant code be two bytes.
- Service Interval reset – reset service interval, if it is activated.
- Service: Client – Programm a Service type – Client.
- Service: Dealer – Programm a Service type – Dealer. Enter Service distance and Service Period before.
- Get DTC’s – Read current CLU trouble codes.
- Clear DTC’s – Clear all CLU trouble codes.
- Lamp Test – Test all light indicators.
- Reset – Reset CLU.
CLU Types
CLU before 2013 ext EEPROM 24C16 – Intsrument clusters based on NEC MCU uPD70F34xx.
Cars: Hyundai Solaris, KIA Sportage 3.
CLU after 2013 ext EEPROM 24C16 – Intsrument clusters based on NEC MCU uPD70F34xx, uPD70F35xx .
Cars: Hyundai Solaris, KIA Ceed, KIA Sportage 3, KIA Soul, KIA SoulEV-1, KIA Sorento.
CLU after 2015 NEC w\o ext EEPROM – Intsrument clusters based on NEC MCU uPD70F35xx .
Cars: Hyundai Creta, Genesis G70, Hyundai Solaris 2, Hyundai Tucson 3, KIA Ceed JD, KIA Optima JF, KIA K5, KIA Rio 4, KIA Soul (VDO), KIA Sorento Prime, KIA Sportage 3(SuperVision), KIA Sportage 4, KIA Stinger.
CLU Color YAZAKI Sportage – Sportage 4 with Colour Display. Only EOL variant coding.
EOL Variant Coding
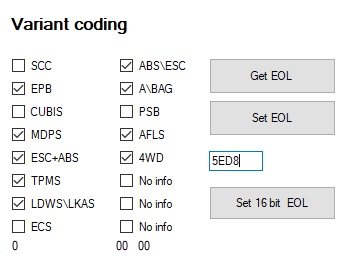
This function doesn’t depend on CLU type, but it depends on a car model year.
For use this function select CLU Type – CLU after 2015 NEC w\o ext EEPROM .
Your car should support activated functions.
For example, you can’t activate SCC – Smart Cruise Control, if your car doesn’t support this option.
Odometer calibration
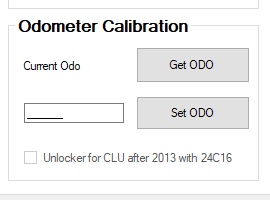
- Be very careful with this functions!
- Remember! All responsibility lies with you!
- Before odometer calibration – Read and Save an EEPROM dump!
- Odometer calibrations depends on the CLU Type !
BCM Page. Body control ECU Customization
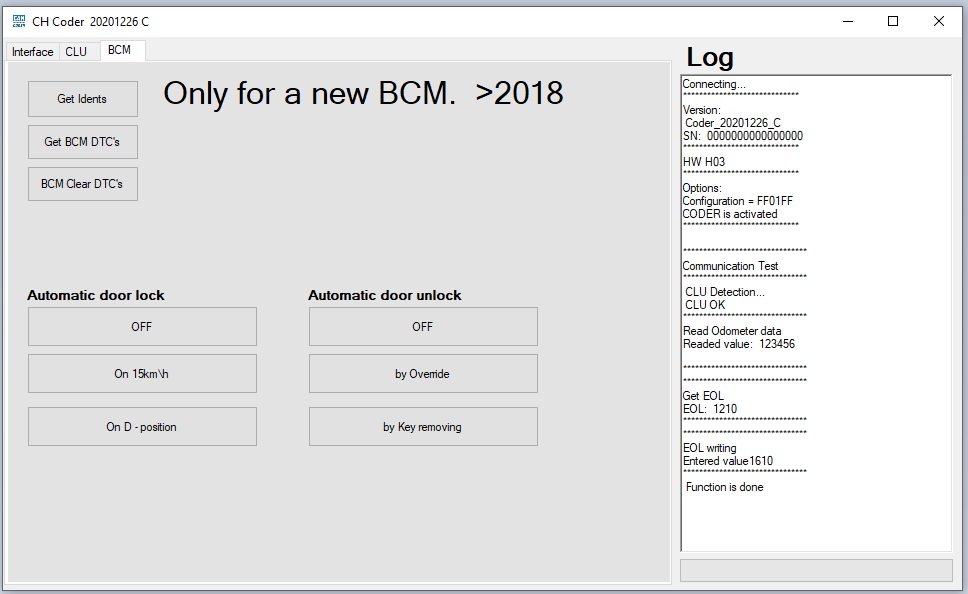
BCM customization is available for cars since 2018 year without ICU !
Connection with a car
If your car doesn’t have an ICU (CAN bus gateway) control unit – you can connect by the OBD2 diagnostic connector.
If your car have an ICU – you have to connect to the C-CAN databus directly. See this wiring diagramm:
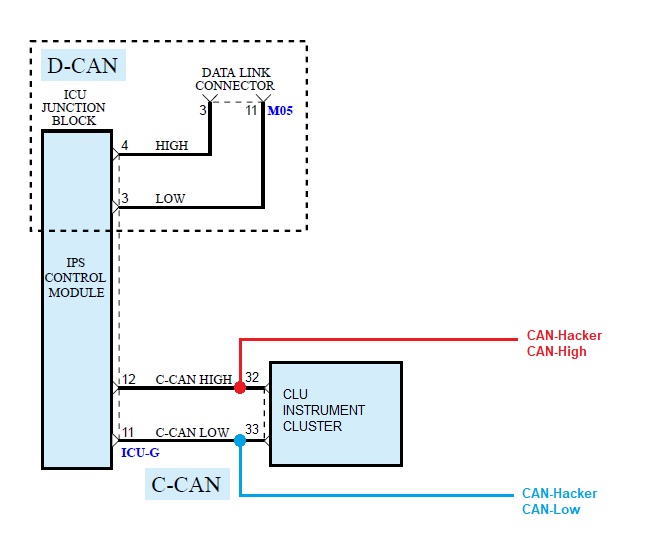
C-CAN Connection on the ICU
C-CAN connection on the Instrument cluster
Be very careful! Check wiring diagramms!